Suite à mon précédent article avec l’utilisation d’une IA souveraine sur Infomaniak et à l’arrivée des agents dans la section « Chat » de n8n, doter mes agents de la capacité à rechercher sur le web.
Des solutions simples existent sous n8n, notamment avec l’intégration du noeud Tavily qui propose des crédits de recherche gratuits. J’ai voulu chercher des solutions plus ouvertes, sans limitation de crédits et réutilisables.
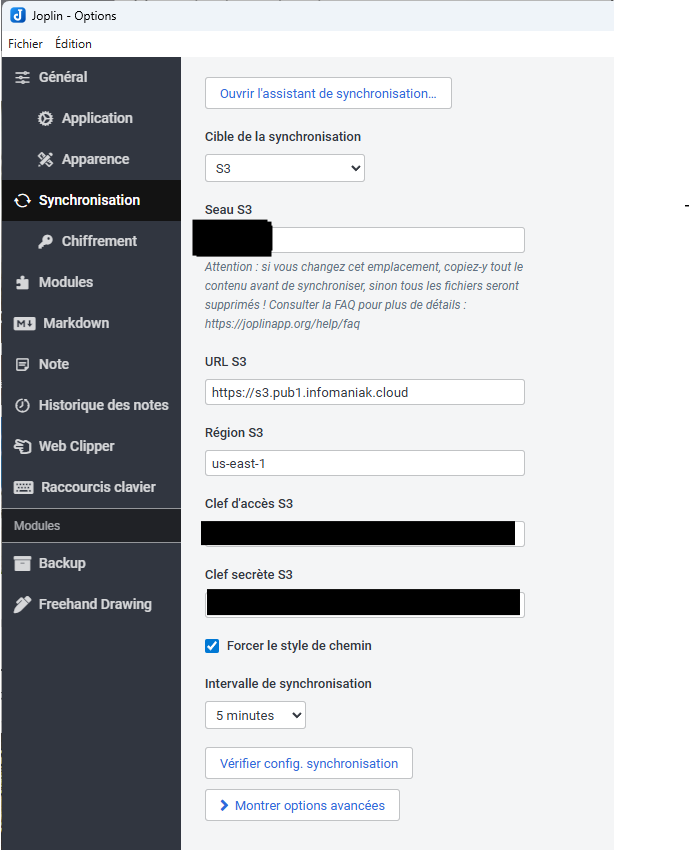
Mes recherches m’ont conduit à SearXNG, que j’ai installé sur mon NAS en suivant ce tuto. En quelques mots, SearXNG ne « parcours » pas le web directement mais utilise de multiples moteurs de recherche et les agrège. Son utilité dans mon cas est qu’il peut fournir du contenu json par API.
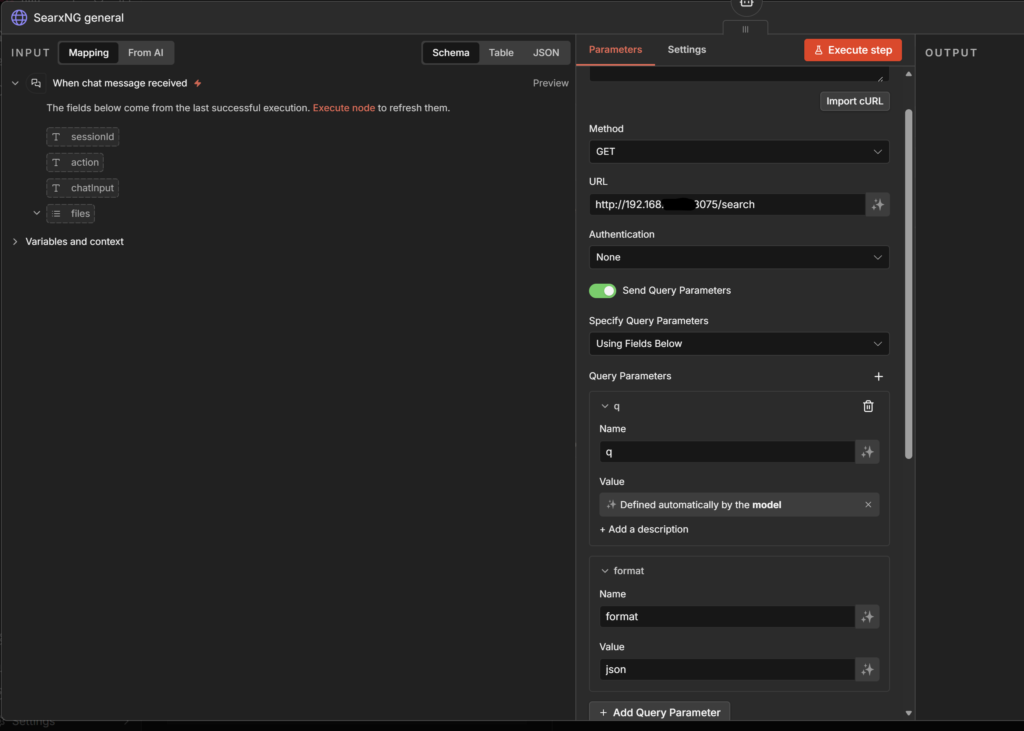
En ajoutant le format ‘json’ à la recherche, il devient possible de requêter efficacement depuis un noeud n8n.
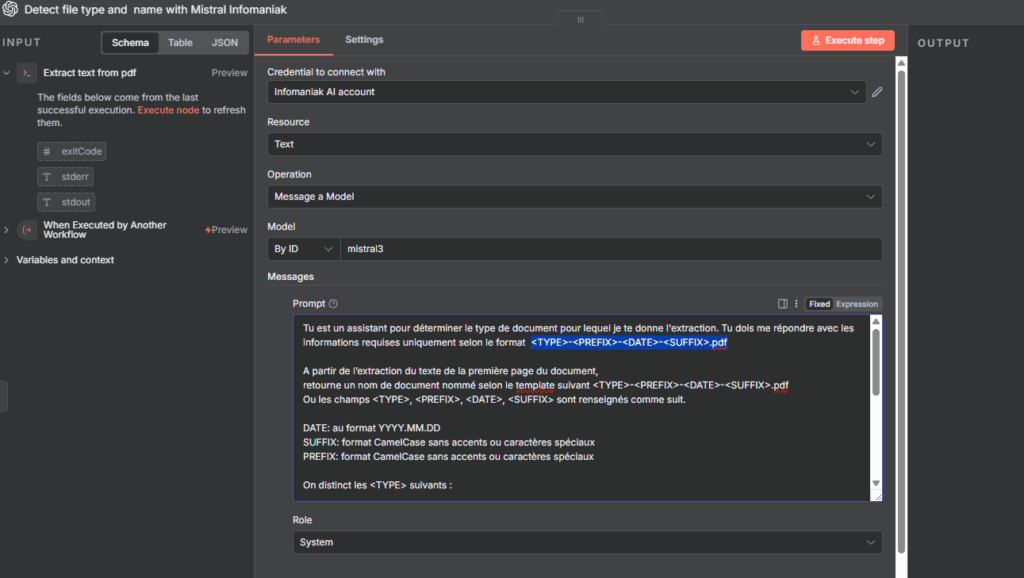
L’appel se fait depuis un noeud HTTP Request, avec les paramètres suivants:
- format: json
- q : définit par le model
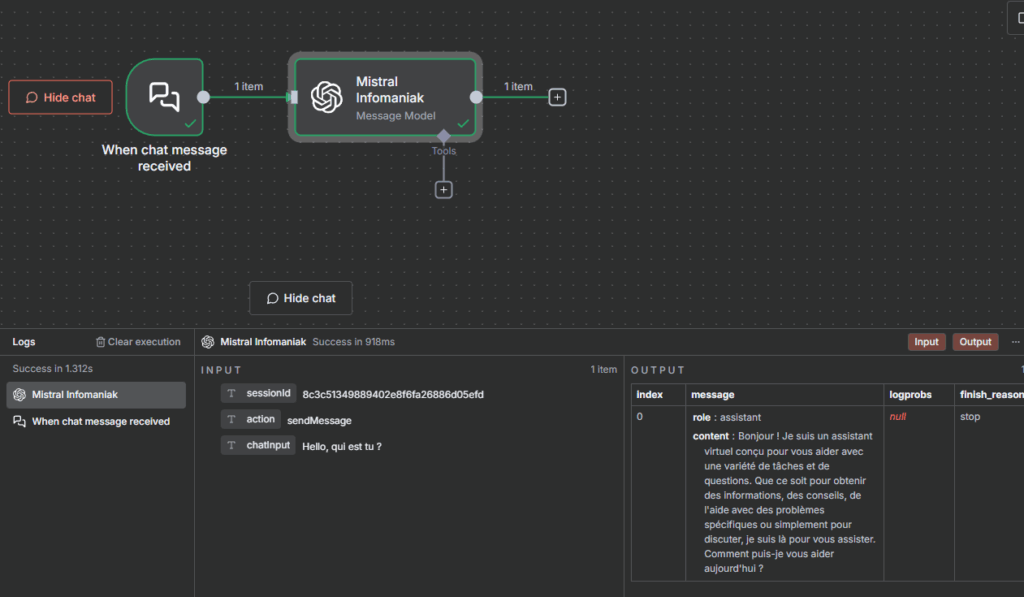
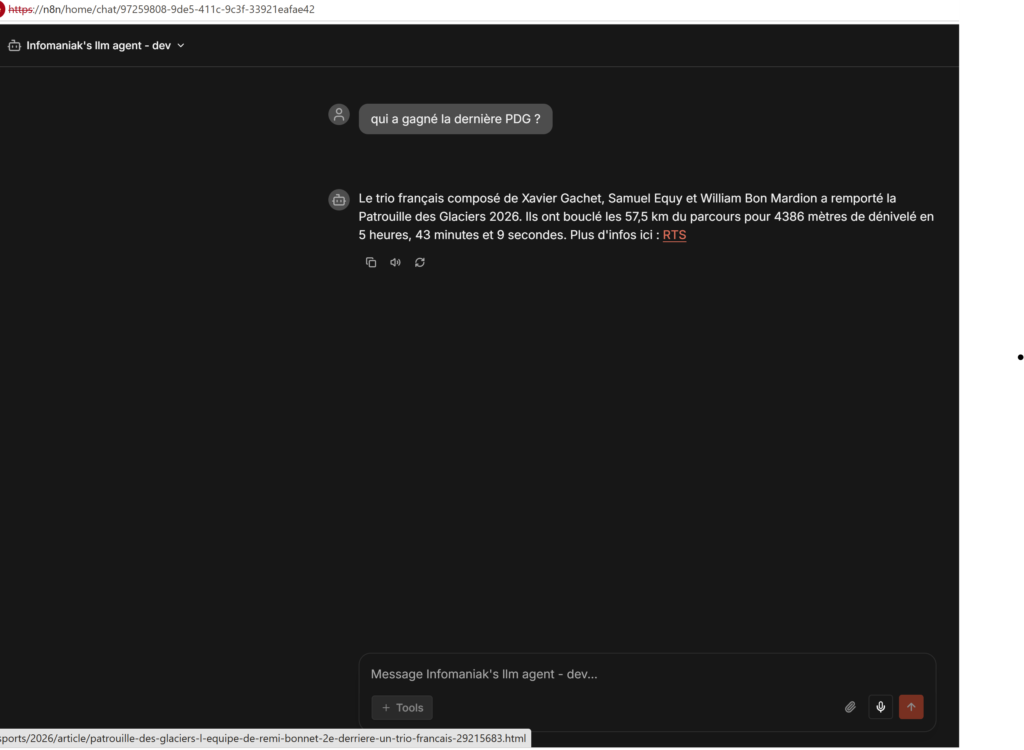
Une fois connecté en tant que tool, nous voilà avec un AI Agent capable de rechercher des informations en ligne.
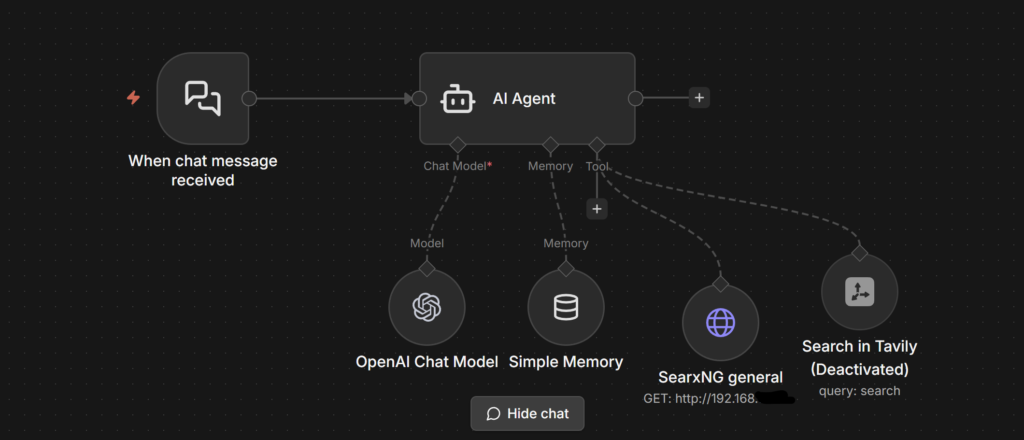
Il reste à ajuster le prompt de l’Agent pour avoir des résultats formatés correctement (lien hypertexte par exemple) et nous voilà avec un Agent IA de recherche basé sur l’API IA (mistral) chez Infomaniak.
Une prochaine étape pourrait être d’affiner la sélection des sources ou d’expérimenter le multi agents.